设为主页
加入收藏
繁體中文
网站首页
公司简介
产品展示
忆阻器阵列
心理学实验室
表面肌电传感器系统
压力发电膜
薄膜弯曲传感器
电容式薄膜压力传感器
薄膜电位计
磁力传感器
薄膜温度传感器
产业动态
公司新闻
行业新闻
产品新闻
客户留言
企业展播
订单流程
诚聘精英
联系我们
压力分布测试系统标定
忆阻器阵列
类人脑AI芯片
低功耗人工智能芯片
ReRAM存储芯片
心理学实验室
近红外脑功能成像
简易型压力分布量测系统
便携式压力量测系统
人体压力分佈量测系统
足部压力分布量测系统
握力压力分布量测系统
轮胎压力分布量测系统
雨刷力量分布量测系统
压力分布测试系统标定
表面肌电传感器系统
大脑工作室
薄膜压力传感器
力学试验机
测力台
压力测量系统
步态分析系统
表面肌电测试系统
运动捕捉系统
运动测量系统
动作捕捉系统
压力分布测量系统
无线传感器测试系统
压力发电膜
薄膜弯曲传感器
电容式薄膜压力传感器
薄膜电位计
磁力传感器
薄膜温度传感器
温度传感器采集卡
薄膜铂电阻温度传感器
柔性NTC温度传感器
气体传感器
>苏州长显光电科技有限公司
>地址:江苏省常熟市常熟沿江经济开发区四海路11号常熟科创园407
>邮编:215500
>联系人:蔡小姐
>电话:0512-51910068
>传真:
>E-mail:changxian-el@hotmail.com
>> 网址:
www.beijingjingxian.com
你的位置:
首页
>>
产品展示
>>
心理学实验室
>>
压力分布测试系统标定
压力分布测试系统标定
临床手部评估用测角手套
来源:薄膜压力传感器 | 发布时间:2019/8/2 10:21:48 | 浏览次数:
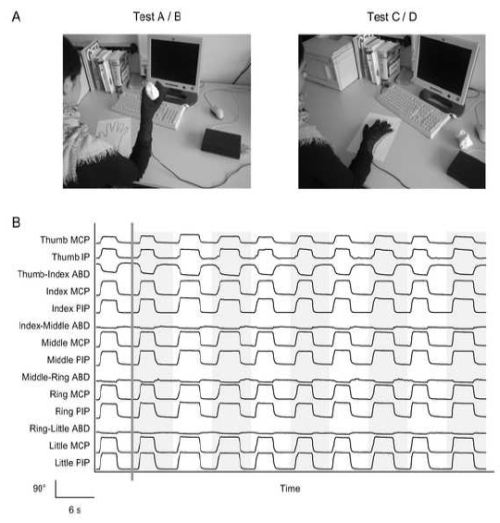
传感器手套 右手手套(中等尺寸)由可伸缩等级的Lycra®定制而成。在手背侧,将两层Lyrca®缝合在一起,以便将传感器插入两层之间(图1)。改良2后,在掌骨(MCP)和近端指间关节(PIP)的背侧放置10个2''传感器。对于拇指,传感器被放置在MCP和指间关节(IP)上。近端传感器的末端可以与远端传感器重叠,这样可以将传感器最佳地放置在MCP和PIP关节上(图1c)。为确保传感器不会离开其位置,将其缝合在手套的近端(图1a、b和c中的箭头)。外展(ABD)传感器由来自同一制造商的四个1英寸传感器组成,放置在食指中间、中环和无名小指之间的半圆配置中(图1b)。如果两个手指被外展,传感器的固定端被拉开,导致弯曲半径增大,从而降低传感器电阻。拇指指数外展传感器固定在拇指和食指之间的手套材料上。 图1:带有14个传感器的手套,用于测量弯曲和外展运动。(a)手套顶视图。改良2后的10个传感器被放置在掌骨(MCP)和近端指间关节(PIP)的背侧。对于拇指,传感器被放置在MCP和指间关节(IP)上。为了确保传感器不会离开它们的位置,它们被固定在手套的一端(黑色箭头)。黑色短矩形表示外展传感器的俯视图。(b)手套前视图(T表示拇指,I表示食指,M表示中指,R表示无名指,L表示小指)。四个外展(ABD)传感器被置于食指中间、中环和无名小指之间的半圆形结构中。拇指指数外展传感器固定在拇指和食指之间的手套材料上。(c)从手指中间切开。在手的背面,两层Lyrca®被缝合在一起,这样传感器就可以插入两层之间。近端传感器的末端可以与远端传感器重叠,这样可以将传感器放置在MCP和PIP关节上。(d)戴手套的中等大小手的受试者的图像。 为了验证传感器的线性,在3名受试者中评估了手套中传感器的校准曲线。两名受试者的手大小为中到大(相当于7.5号),而第三名受试者的手大小为小(相当于6号)。将测角仪(1°分辨率)调整为0、15、30、45、60、75和90°(拇指传感器最大60°),并放置在每个关节的背侧。当关节保持恒定角度时,记录阻力。对于外展传感器,受试者将平手放在一张桌子上,标记角度为0、5、10、15、20、25和30°。对每个受试者重复此程序三次,并将平均值用于校准曲线。 传感器信号调节 传感器电缆(厚度0.15 m m;长度1.5 m)插入物理分离的空调单元。调节单元由14个增益可调的放大器电路组成。修改后的传感器2用作非反转放大器的反馈电阻,从而使电阻变化(rsensor,new)和放大器输出电压之间存在线性关系(图2)。14个放大器的电压是模拟/数字(A/D)转换为12位,由商用A/D卡(Labjack U3,Labjack Corporation,Lakewood,Co,USA)转换,并通过USB输入个人计算机。传感器信号在50赫兹采样,并通过定制开发的Java软件写入数据文件。传感器分辨率约为0.1°,可以通过更灵活的调节设置进一步提高,例如,允许对每个放大电路进行单独的输入电压自适应。此外,还提供了传感器信号的类似输出。 图2:将传感器电阻变化转换为数字电压信号的调节电路。在非反向放大器的反馈路径中插入经过修改的传感器2,从而使电阻变化与放大器输出电压之间存在线性关系。在恒定输入电压uin下的转换增益可以通过电位计r进行调整。14个放大器的电压通过市售A/D卡以12位转换为A/D,并通过USB输入个人计算机。 重复性测量 由于修改后的线性传感器特性2,传感器信号与C之间的关系 由于修改2后的线性传感器特性,传感器信号与相应弯曲角度之间的关系由每个传感器的绝对最大和最小信号值确定。受试者采用不同的手部姿势(平手,手指外展最小,拳头和平手,手指外展最大)从3个10秒记录中获得最小和最大值。最小值与0°相关,而最大值与解剖确定的每个关节最大弯曲角度相关(Beers和Berkow,1999年)。我们排除了传感器手套限制手指最大弯曲角度的可能性,要求两位经验丰富的理疗师测量食指MCP和PIP关节在一个受试者戴上或不戴手套的情况下的运动范围。没有发现差异,表明校准程序没有受到传感器手套的影响。 在5名受试者(3名男性和2名女性)中进行了4次重复性试验,与前面描述的试验类似(Wise等人,1990年):为每个受试者制作了石膏模,以确保试验A和B中的指关节能够始终放置在同一位置。受试者被要求通过拇指与其他手指相对挤压模型块来创造一个圆柱形物体。当质量变硬(~20分钟)后,握持姿势可以重复相同。因为研究表明握力会影响测试精度,所以我们遵循Dipietro及其同事的建议,指导受试者尽可能地用较小的力握持模具(Dipietro等人,2003年)。 测试A:模具夹持和手套之间的数据采集 本试验旨在量化大致圆柱形握持姿势的重复性。受试者的手最初是平放在桌子上的。在发出通电信号后,受试者紧握石膏模,直到6秒后数据记录停止。然后,手回到平坦位置,开始下一次试验。记录了10个试块,每个试块由10个试验组成。受试者没有摘下垫块之间的手套。 测试B:数据采集之间的模具夹持和手套关闭 测试B类似于测试A,只是手套在每一块之前被取下并重新戴上。在此,对穿脱的影响进行了量化。 测试C:数据采集之间的平手和手套 为了评估中立位置的一致性,受试者将他们的平手放在一张桌子上,手指位置标记。在发出“走”信号后,受试者进行了所有手指的弯曲运动,并在~3 s后恢复到平手位置。记录在6 s后停止。同样,记录了10个由10个试验组成的块,每个试验各10个。 测试D:数据采集之间的平手和手套关闭 这项测试类似于测试C,只是手套在每个挡块之前被取下并重新戴上。 用户调查表 根据Simone及其同事改编的用户问卷(表1),对手套操作和佩戴舒适性的反馈进行评估(Simone等人,2007年)。每一个项目由10名受试者按从1(强烈不同意)到7(强烈同意)的范围进行评判。 统计分析 回归分析后,r2值作为校准曲线的线性测量。为了进行重复性分析,每个试验的最后20个样本进行平均,以将数据减少到14个代表试验结束姿势的静态关节角度。如前所述(Dipietro等人,2003年),每个试验的100次试验可表示为三维矩阵xijk,其中i=1…10表示第i次试验,j=1…10表示第j个试块,k=1…14表示第k个传感器。重复性测量的准确度被量化为范围(范围)和标准偏差(sd)(Dipietro等人,2003年;Simone等人,2007年)。对于每个重复性试验和每个受试者,范围计算如下: 计算sd为xjk值的标准偏差。关节或受试者的标准差和范围值平均。 通过组内相关系数(ICCS)评估每个测试中测量值之间的可靠性。通过从每名受试者随机选择的两个试块中随机选择两个试验,计算每个试验的ICC值。计算了两个试验中最后20个样本的平均角度。然后,将来自所有受试者的每个关节的角度对汇集在一起,计算每个关节的ICC(Shrout和Fleiss,1979)。ICC的计算是基于受试者之间和受试者内部差异的比较,其中受试者内部差异反映了测量误差。如果受试者内方差较低,ICC接近1,测量结果被认为是可靠的。相反,如果ICC接近0,方差的很大一部分i 单因素方差分析用于比较校准后受试者之间的r2值。所有数值均表示为平均值±标准值。 结果-传感器评估 传感器阶跃响应 为了评估传感器信号的稳定性,如图3a所示,将传感器连接到手动角度计上。在40 s的弯曲过程中测试了6个传感器(灰色线表示每个传感器3个测量周期的平均值;黑色线表示传感器之间的平均值)。t5时,所有传感器的电阻持续下降6.3±1.4%(见图3b的左上面板和T1-T4时的平均衰减百分比)。六个传感器中的三个在58分钟的弯曲过程中被额外监控。结果表明,抗药性继续下降约30分钟(T8),然后保持相对稳定。测量结束时,弯曲50分钟后(t10),平均衰减为16.8±4.9%(图3b,右上面板)。 修改1后,t5(图3b,左下面板)处的传感器电阻下降了-1.0±0.8%,比原来的传感器低了6倍。此外,六个传感器中的三个电阻保持稳定(-1.9±1.0%),直到阶跃响应后50分钟(t10)的最后一次测量(图3b,右下面板)。所有时间点的结果显示在图3的相应面板中。因此,通过相对简单的修改,可以消除电阻式弯曲传感器用于可靠测量手指运动的一个主要缺点。电阻式弯曲传感器的第二个不需要的特性非线性行为通过修改2得到补偿。 图3:传感器修改前后的传感器特性变化。(a)装有传感器的测角仪。通过旋转测角仪的元件,传感器可以弯曲到任何需要的角度。(b)在6个传感器(灰色线表示每个传感器三次测量中的平均值;黑色线表示所有传感器的平均值)中,在弯曲至约60°的40 s期间(左上面板)和(左下面板)修改1后记录传感器电阻的变化。六个传感器中的三个在修改前(右上面板)和修改后(右下面板)进行测试,测试条件持续60分钟。分别显示T1-T5和T6-T10的平均衰减值。在这两种情况下,修改1都大大减少了阶跃功能后传感器电阻的衰减。(c)传感器电阻变化与弯曲角度(校准曲线)之间的关系,取决于修改1后平行于传感器放置的电阻值。为了进行比较,每个校准曲线的最大电阻与1相关,最小电阻与0相关。黑色表示经验确定的校准曲线,而灰色表示基于校准曲线的模拟,没有平行电阻(rparallel=∞,点黑线)。根据子集中的r2值进行量化,校准曲线的线性度最好,并联电阻在15kΩ和20kΩ之间。实施时,电阻值为18 kΩ(实心黑线)(修改件2)。 传感器线性 在改进1的基础上,对传感器的线性度进行了评估和增强。如图3c所示,通过将一个电阻平行于传感器(修改件2)来修改校准曲线的形状。根据无平行R的传感器的校准曲线,计算出获得线性关系的平行电阻的最佳值。电阻(图3c,黑色虚线)。平行于传感器放置的不同电阻值(1、5、10、15、20、50和200 kO)的数值模拟产生了校准曲线如何改变其形状的预测(图3c,灰色细线)。模拟校准曲线的电阻值,最高的r2值,因此最佳线性在15-20 kΩ范围内。图3c的子集中显示了一个完整的r2值列表(灰色条表示模拟校准曲线的r2值;黑色条表示经验性确定的校准曲线的r2值)。为了实现此功能,将一个值为18 kΩ的电阻平行于传感器放置,并且确定了新的经验校准曲线(图3c,实心黑线;r2=0.9975)。对于外展传感器,类似地选择了47 kΩ的电阻值。 由于在不同半径弯曲时传感器的校准曲线会发生变化(Simone和Kamper,2005年),手套中嵌入的14个传感器在不同手尺寸的受试者中的线性可能会有所不同。为了解决这一点,所有的传感器都在两名男性受试者中手动校准,一名女性受试者中手动校准,另一名女性受试者的手则较小。对于每个受试者,完成该程序需要约30分钟。所有受试者的平均r2值在0.9855到0.9980之间,总平均值为0。由于在不同半径弯曲时传感器的校准曲线会发生变化(Simone和Kamper,2005年),手套中嵌入的14个传感器在不同手尺寸的受试者中的线性可能会有所不同。为了解决这一点,所有的传感器都在两名男性受试者中手动校准,一名女性受试者中手动校准,另一名女性受试者的手则较小。对于每个受试者,完成该程序需要约30分钟。所有受试者的平均r2值在0.9855到0.9980之间,总平均值为0.9915±0.0031,表明线性度很高。四个关节的示例如图4a所示(显示的r2值表示受试者的平均值)。小手掌尺寸女性受试者(0.9881±0.0086)关节处的平均r2值较大手掌尺寸男性受试者(分别为0.9942±0.0058和0.9921±0.0064)稍小,但差异无统计学意义(方差分析,F=2.78,P=0.07)。因此,修改2后的线性度仅受不同手尺寸的轻微影响。为了获得绝对最佳的特性,可以对为小手和大手制造的手套的修改参数进行优化。 图4:手套内置传感器(修改后2)的线性度。(a)三名受试者中四个典型关节的三条经经验确定的标准化校准曲线的平均值。受试者显示的平均r2值接近1,表明线性度很高。在一名受试者中,另外测量了-15°的超延伸。结果表明,在超拉伸过程中,传感器与电流修正参数之间没有保持线性关系。(b)但是,我们重复了优化程序,使用一个0.1 mm厚的塑料箔(修改件1)和一个并联电阻为1 kΩ(修改件2),安装在一个试验对象的原型手套中。我们发现线性维持在30°超延伸到90°的范围内。因此,通过优化修改参数,可以解决电阻式弯曲传感器的一般缺点。给出了拇指IP和索引MCP传感器的示例。 电阻式弯曲传感器的一个普遍缺点是当向相反方向弯曲时会突然失去灵敏度,例如测量掌指骨超伸所需的灵敏度。为了解决当反方向弯曲时,修改如何影响传感器灵敏度的问题,我们在一个受试者身上测量了MCP(拇指IP)关节的超伸(-15°)。如图4a所示,对于超伸展运动,灵敏度降低,传感器的线性关系没有保留。但是,我们重复了优化过程,在一个主题中,使用一个0.1 mm厚的塑料薄膜(修改件1)和一个1 kΩ的模拟并联电阻(修改件2)安装在原型手套中。我们发现,在这些参数(所有MCP和IP关节的平均r2为0.9965±0.0048,示例见图4b)内,MCP(拇指)关节的线性维持在30°超伸至90°弯曲范围内(IP和60°最大弯曲)。因此,我们的改进概念能够解决电阻式弯曲传感器的另一个缺点。据我们所知,这是第一次证明人类手指运动的整个范围可以用线性化电阻弯曲传感器来测量。因为我们在目前的研究中没有测量过超伸展运动,所以目前的结果没有被破坏。在未来,将构建和使用具有这些最佳修改参数的传感器手套。到目前为止,我们可以证明,传感器的改进提高了传感器的特性,这是可靠测量人类手指运动的先决条件。在下一步中,我们量化了传感器手套的重复性和可靠性。 重复性和可靠性 使用每个关节的最大和最小传感器值校准手套,不包括掌指间关节的过度伸展(拇指指间关节)。校准是必要的,以调整传感器范围到不同的手大小。在三个校准周期内,最小值和最大值都是稳定的(数据未显示),这表明手套很好地贴在受试者的手上,并且在校准过程中没有移动。 图5a说明了主要的试验安排。在试验A和B(左图)中,对大致圆柱形握持姿势的重复性进行了量化。受试者的手最初是平放在桌子上的。在一个行动信号后,受试者紧紧抓住石膏模。数据记录结束后,将手放回平坦位置,开始下一次试验。在测试C和D中评估中性平手位置的一致性(图5a,右图)。获得的典型传感器读数f重复性和可靠性 使用每个关节的最大和最小传感器值校准手套,不包括掌指间关节的过度伸展(拇指指间关节)。校准是必要的,以调整传感器范围到不同的手大小。在三个校准周期内,最小值和最大值都是稳定的(数据未显示),这表明手套很好地贴在受试者的手上,并且在校准过程中没有移动。 图5a说明了主要的试验安排。在试验A和B(左图)中,对大致圆柱形握持姿势的重复性进行了量化。受试者的手最初是平放在桌子上的。在一个行动信号后,受试者紧紧抓住石膏模。数据记录结束后,将手放回平坦位置,开始下一次试验。在测试C和D中评估中性平手位置的一致性(图5a,右图)。从测试C中的一个受试者获得的典型传感器读数如图5b所示:10个试验(1个试块)的数据文件被连接并可视化。对于每一个试验,受试者最初将他们的平手放在一张桌子上,手指位置标记。发出Go信号后,受试者进行所有手指的弯曲运动,并在~3s后回到平手位置。6 s后停止记录,并使用每个关节最后20个样本的平均值(第一次试验中图5b中的深灰色阴影矩形)进行分析。在试验B和D的试块之间取下手套。 图5:重复性试验原理。(a)在试验A和B(左图)中,对大致呈圆柱形的握持姿势的重复性进行了量化。受试者的手最初是平放在桌子上的。在发出行动信号后,受试者紧握石膏模,直到6秒后数据记录停止。然后,手回到平坦位置,开始下一次试验。记录了10个试块,而一个试块包括10个试验。在试验B中,在两个试块之间取下手套。在测试C和D(右图)中,评估中性位置的一致性。受试者最初将平手放在一张桌子上,手指位置有标记。在发出Go信号后,受试者进行了所有手指的弯曲运动,并在~3 s后回到平手位置。记录在6 s后停止。在测试d中,手套在两块之间被移除。(b)一个主题中每个关节的原始数据。将一个测试C块中的十个数据文件连接起来并可视化。不同的背景色表示不同的数据文件。每个数据文件的最后20个样本用于分析。深灰色阴影矩形表示与(a)中的平手位置相对应的第一个数据文件的最后20个样本。 正如WISE及其同事所指出的(WISE等人,1990年),范围和sd值彼此高度相关(图6a)(r>0.99,皮尔逊相关系数)。根据以往的研究,平均平手重复性(范围3.29°±1.29°;sd1.07°±0.42°)优于平均握力重复性(范围6.63°±1.86°;sd 2.10°±0.56°)。此外,不取下手套的重复性(范围4.35°±2.14°;标准偏差1.4°±0.65°)优于取下块间手套的重复性(范围5.57°±2.43°;标准偏差1.77°±0.76°)。 五名受试者中的一名(受试者3)的手大(>7.5),这使得很难将手套一直套在手上。这反映在受试者的较高范围和sd值上,特别是在测试b和d中(图6a黑色三角形)。总结所有受试者的平均重复性值,并与表2中其他研究的结果进行比较。还计算了受试者各关节的范围和sd值(图6b中sd值的可视化)。在这项分析中,除了拇指指数ABD传感器,所有关节的SD值在0.96°到1.93°之间(范围为3.05°-6.16°之间),其余关节的SD值在3.65°之间(范围为11.01°之间)。 图6:重复性分析结果。(a)根据试验A-试验D的每个受试者的平均标准偏差绘制的平均范围。如其他作者所述,范围和标准偏差值彼此高度相关。(b)受试者和试验中每个关节的平均标准差。结果与之前评估的传感器手套相当。 计算ICC值以确定测量之间的可变性。接近1的ICC值表示高可靠性,而接近0的ICC值表示低可靠性。在目前的研究中,所有测试的平均ICC都很高,范围从0.87(中环ABD)到0.98(小MCP),测试和关节的总体平均值为0.93±0.05。因此,传感器手套的重复性和可靠性很高,并且在先前评估的传感器手套范围内。用于评估为了评估修改1后传感器刚度增加对关节活动性的影响程度,我们还对三名同时戴着左右手套的受试者进行了实验。修改1后,左手套配备了原始传感器,右手套配备了传感器。要求受试者移动手指,之后再次询问问题3和问题6两种手套。问题3的答案在两种手套之间是相等的(左侧为4.67±0.58,右侧为4.67±2.31)。对于问题6,装有原始传感器的手套(5.33±0.58)的结果略好于装有改进传感器的手套(5.0±1.73)。总之,这些结果表明,与手套材料相比,改性1对手指关节刚度的贡献很小。 讨论 传感器手套具有广泛的应用领域,包括虚拟现实、机器人或计算机游戏。特别有趣的是它们在康复或生理评估中的应用。对于所有的应用,精确的测量,易于操作和低价格是传感器手套的理想特性。在这里,我们介绍了一种传感器手套,它是由W_rzburg大学开发的(因此被称为-手套),似乎满足了许多这些特点。 传感器电阻稳定性 为了精确测量,传感器电阻的稳定性是强制性的(Simone和Kamper,2005年)。然而,碳墨水传感器显示,随着时间的推移,当不断弯曲电阻衰减。例如,Abrams Gentile传感器(Abrams Gentile Entertainment Inc,New York,USA)在30 s后衰减至初始电阻的约25%(Simone和Kamper,2005年),经我们实验室未公布的结果证实,限制了其在人体手指运动定量测量中的应用。我们发现,在30 s后,2''柔性点传感器的衰减在约6%的范围内,因此甚至优于先前提出的最佳电阻弯曲传感器(Simone和Kamper,2005)的3''柔性点传感器(衰减约9%)。在单独的实验中,我们发现在弯曲50分钟后,传感器电阻进一步降低到约18%。通过在传感器基板上安装一层薄薄的塑料薄膜,这种衰减可以显著降低到小于2%的程度。因此,修改1可以消除电阻式弯曲传感器的一个主要缺点。传感器刚度的相关增加在很大程度上影响了用户的舒适性,这可以从用户反馈问卷的问题3和6中排除出来,在这些问题中,受试者只感觉到手指运动的轻微限制,而感觉不到两者之间的实质性差异。有改进的手套和有原始传感器的手套。 传感器线性 第二个理想特性是最终手套传感器信号(通常是电压)和弯曲角度之间的线性关系,而线性取决于传感器电阻和调节电路。使用一个信号调节电路,将传感器电阻成比例地转换成电压信号,降低了最终信号的线性度源,仅限于传感器电阻。我们通过将一个电阻平行于传感器(修改件2)得到了传感器电阻和弯曲角度之间的线性关系。由于只需要两个角度电压对(传感器值在平手位置和最大弯曲),14个传感器的校准时间仅在~10 s内完成。相反,如果最终电压信号与关节角度不成线性关系,则需要花费大量时间进行校准。(~本研究中需要30分钟,Simone及其同事研究中5个传感器需要约8分钟),还需要额外的离线数据处理(Simone等人,2007年)。此外,修改后传感器的线性确保了在整个移动范围内进行A/D转换后的传感器分辨率恒定,当A/D转换前的弯曲信号与弯曲角度没有线性关系时,也不会出现这种情况。 不同手部尺寸的受试者的线性变化很小,说明手部尺寸对线性影响较小。然而,为了优化线性度,可以为不同尺寸的手(小、中、大)设计手套,并为适当尺寸的手设计最佳调整的修改参数(箔厚度和平行阻力)。同样,电阻式弯曲传感器的另一个不需要的特性,即反向弯曲时的灵敏度损失,可以通过更改修改参数来消除。这些结果表明,电阻式弯曲传感器适用于对人体手指运动的整个范围进行线性测量。未来的传感器手套和调节电路将为此功能进行优化。我们还将测试不将传感器电阻线性转换为电压信号的替代调节电路。有了这样的设置,线性化m不同手部尺寸的受试者的线性变化很小,说明手部尺寸对线性影响较小。然而,为了优化线性度,可以为不同尺寸的手(小、中、大)设计手套,并为适当尺寸的手设计最佳调整的修改参数(箔厚度和平行阻力)。同样,电阻式弯曲传感器的另一个不需要的特性,即反向弯曲时的灵敏度损失,可以通过更改修改参数来消除。这些结果表明,电阻式弯曲传感器适用于对人体手指运动的整个范围进行线性测量。未来的传感器手套和调节电路将为此功能进行优化。我们还将测试不将传感器电阻线性转换为电压信号的替代调节电路。在这种设置下,线性化可以由调节电路直接执行,而不需要额外的电阻。据我们所知,-手套是第一种手套设计,采用线性电阻弯曲传感器,因此结合了低传感器成本和理想的传感器特性。此外,手套的可靠性和重复性都很高。 重复性和可靠性 虽然存在几种商用和非商用传感器手套,但只有少数研究系统地论述了其可靠性和准确性(Dipietro等人,2003年;Mentzel等人,2001年;Simone等人,2007年;Wise等人,1990年)。与这些传感器手套相比,手套的重复性和可靠性结果相似(表2)。如图6b所示,MCP、PIP和ABD(拇指指数ABD除外)关节的SD值之间没有显著差异。这表明该手套的范围和SD值可以与配备不同传感器类型和不同传感器数量的手套进行比较。拇指指数ABD关节的较高误差可能与手套上传感器的位置有关,这可能不是最佳的。第二个错误源可能是重复性协议本身。正如其他人所指出的,重复性试验的结果不仅受传感器手套的技术特性的影响,还受诸如握力(Dipietro等人,2003)或拇指和手指放置的小偏差等因素的影响。我们试图通过指导受试者以尽可能小的力抓住模具,并监测手的恒定位置来尽量减少这些影响。尽管有这些影响,标准偏差仅为1.59°,这反映了高测量重复性。ICCS对可靠性进行了定量评估(范围为0.81–0.99,关节间平均值为0.93),与Simone等人评估的手套相当。(Simone等人,2007年)(ICCS从0.79到0.99,平均值为0.95),Dipietro等人(Dipietro等人,2003年)(ICCS从0.7到1.0)和Mentzel等人(Mentzel等人,2001年)(ICCS从0.82到0.99,平均值为0.94,尽管在本研究中,试验程序有所不同)。因此,手套的重复性和可靠性与其他评估手套相似,也在手动测角的测量可靠性范围内(Wise等人,1990年)。 与实际应用有关的问题 通过用户反馈问卷评估,用户接受度和适用性都很高。这表明修改并不是以用户接受为代价完成的。通过使手套适应不同的手尺寸,并优化线性可扩展到超伸展运动的修正参数,可进一步提高舒适性和测量精度。进一步优化用户舒适度和增加手套物理工作空间的另一种可能性是手套与计算机之间的无线数据传输。然而,-手套的目的是在TMS环境中工作,由于其巨大且快速变化的磁场(高达2特斯拉),TMS环境可能会对无线数据传输造成干扰。通过从手套上拆下除弯曲传感器以外的所有电气元件,可以将这些可能的外部干扰降至最低。在第一次使用TMS的实验中,我们没有发现任何刺激伪影或传感器信号的失真,这表明手套与这种神经生理技术的结合是可靠的操作。分布式设计的第二个优点是,相同的调节电路可用于不同的手套(例如,用于不同的手尺寸),进一步降低了成本。为了最大限度地提高灵活性,调节单元为每个传感器提供了类似的输出。因此,它可以连接到任何A/D转换器,例如,允许使用现有的硬件设备同时同步记录肌电信号和手指运动。最后,可通过控制器的电位计优化手套的传感器分辨率(~0.1°)分布式设计的第二个优点是,相同的调节电路可用于不同的手套(例如,用于不同的手尺寸),进一步降低了成本。为了最大限度地提高灵活性,调节单元为每个传感器提供了类似的输出。因此,它可以连接到任何A/D转换器,例如,允许使用现有的硬件设备同时同步记录肌电信号和手指运动。最后,通过调节电路的电位计可以优化手套的传感器分辨率(~0.1°),并且比大多数其他传感器手套的分辨率(从0.2°到0.5°不等)都高。例如,CybergLove®II的名义分辨率约为0.5°,这对于记录小手指运动(如TMS后)可能不是最佳的(Gentner和Classen,2006年)。 结论 本报告中的手套提供了可靠的线性高分辨率关节角度信号。手套元件的材料成本低于500美元,比一些商用传感器手套的价格低约10-20倍。我们还发现,手套的无缺陷操作在与TMS相关的大磁场中得以保留。这表明,它可能是生理学研究的有用装置,如Gentner和Classen(Gentner和Classen,2006年)。最后,用户可接受性与之前描述的传感器手套相当。事实上,它可以很容易地为左右手制作不同大小的手,这使得它成为一个灵活的测量系统,也可以适用于研究非人类灵长类动物(如猴子)的运动。 工具书类 Adamovich SV、Merians AS、Boian R、Tremaine M、Burdea GS、Recce M、Poizner H。中风后手部康复的虚拟现实运动系统:功能转移。美国电气与电子工程师学会会议录,2004年;7:4936-9。 Beers MH,Berkow R.《默克诊断与治疗手册》,第17版,约翰威利父子出版社:纽约,1999年。 Boesnach I、Moldenhauer J、Burgmer C、Beth T、Wank V、B_S K。通过神经网络和隐马尔可夫模型对人体运动阶段的分类。国际控制论与智能系统会议:新加坡,2004:976-81。 Classen J、Liepert J、Wise SP、Hallett M、Cohen LG。实践诱导的人皮质运动表征的快速可塑性。《神经生理学杂志》,1998年;79:1117-23。Dipietro L,Sabatini AM,Dario P.手部运动采集仪器手套的评估。《康复研究与发展》,2003年;40:179-89。 Gentner R,Classen J。人体中枢神经系统手指运动的模块化组织。神经元,2006;52:731-42。 霍顿MK。运动康复的虚拟环境:回顾。网络心理行为学,2005;8:187-211。 Hommel G、Hofmann FG、Henz J。图柏林高精度传感器手套。1994年米兰大学第四届国际科学会议《世界自然科学大会论文集》。 Jerde Te,Soechting JF,Flanders M.生物约束简化了手形的识别。IEEE Trans Biomed Eng,2003;50:265-9. Kessler-GD,L.H,N.W.《网络手套作为一种全手输入装置的评价》。ACM Trans Comput Hum Interact,1995年;2:263-83。 朗斯,希伯。运动皮层或皮质脊髓束损伤后人类个体手指运动的差异性损伤。《神经生理学杂志》,2003年;90:1160-70。 朗斯,希伯。人手指独立性:被动机械耦合与主动神经肌肉控制的局限性。神经生理学杂志,2004a;92:2802-10。 朗斯,希伯。在运动皮层或皮质脊髓束受损后,在人类个体手指运动过程中,肌肉选择性降低。《神经生理学杂志》,2004b;91:1722-33。 梅森CR、戈麦斯JE、艾布纳TJ。手握时手的协同作用。神经生理学杂志,2001;86:2896-910。 门泽尔·M、霍夫曼·F、艾宾格·T、杰佐·B、金兹尔·L、瓦赫特·新泽西。用感觉手套测量手指关节角度的再现性。Handhchir Mikrochir Plast Chir,2001年;33:59-63。 Santello M、Flanders M、Soechting JF。工具使用的姿势手协同作用。神经科学杂志,1998;18:10105-15。 Shrout PE,弗莱斯Jl.类别内相关性:用于评估评分者可靠性。《心理通报》,1979年;86:420-28。 Simone LK,Kamper DG。设计一个可穿戴的显示器来测量手指的姿势。神经工程康复杂志,2005;2:5. Simone LK、Sundarrayan N、Luo X、Jia Y、Kamper DG。一种低成本仪器手套,用于延长监测和功能手评估。神经科学方法学杂志,2007;160:335-48。 Tsagarakis Ng,Kenward B,Rosander K,Caldwell DG,von Hofsten C,“婴儿手套”:研究婴儿手部运动控制发展的装置。欧洲触觉,2006年。Weiss EJ,Flanders M.人体手的肌肉和姿势协同作用。《神经生理学杂志》,2004年;92:523-35。 Williams NW、Penrose JM、Caddy CM、Barnes E、Hose Dr、Harley P.A临床用测角手套Jerde Te,Soechting JF,Flanders M.生物约束简化了手形的识别。IEEE Trans Biomed Eng,2003;50:265-9. Kessler-GD,L.H,N.W.《网络手套作为一种全手输入装置的评价》。ACM Trans Comput Hum Interact,1995年;2:263-83。 朗斯,希伯。运动皮层或皮质脊髓束损伤后人类个体手指运动的差异性损伤。《神经生理学杂志》,2003年;90:1160-70。 朗斯,希伯。人手指独立性:被动机械耦合与主动神经肌肉控制的局限性。神经生理学杂志,2004a;92:2802-10。 朗斯,希伯。在运动皮层或皮质脊髓束受损后,在人类个体手指运动过程中,肌肉选择性降低。《神经生理学杂志》,2004b;91:1722-33。 梅森CR、戈麦斯JE、艾布纳TJ。手握时手的协同作用。神经生理学杂志,2001;86:2896-910。 门泽尔·M、霍夫曼·F、艾宾格·T、杰佐·B、金兹尔·L、瓦赫特·新泽西。用感觉手套测量手指关节角度的再现性。Handhchir Mikrochir Plast Chir,2001年;33:59-63。 Santello M、Flanders M、Soechting JF。工具使用的姿势手协同作用。神经科学杂志,1998;18:10105-15。 Shrout PE,弗莱斯Jl.类别内相关性:用于评估评分者可靠性。《心理通报》,1979年;86:420-28。 Simone LK,Kamper DG。设计一个可穿戴的显示器来测量手指的姿势。神经工程康复杂志,2005;2:5. Simone LK、Sundarrayan N、Luo X、Jia Y、Kamper DG。一种低成本仪器手套,用于延长监测和功能手评估。神经科学方法学杂志,2007;160:335-48。 Tsagarakis Ng,Kenward B,Rosander K,Caldwell DG,von Hofsten C,“婴儿手套”:研究婴儿手部运动控制发展的装置。欧洲触觉,2006年。Weiss EJ,Flanders M.人体手的肌肉和姿势协同作用。《神经生理学杂志》,2004年;92:523-35。 Williams NW、Penrose JM、Caddy CM、Barnes E、Hose Dr、Harley P.临床手部评估用测角手套。施工、校准和验证。J Hand Surg,2000年;25:200-7。 WISE S、GARDNER W、SABELMAN E、Valainis E、Wong Y、Glass K、Drace J、Rosen JM。半自动测角测量用光纤手套的评价。《康复研究与发展》,1990年;27:411-24。
TAG:
打印本页
||
关闭窗口
上一篇:
弯曲传感器放
下一篇:
I-Scan Lite简易型压力分布量测系统